控制系统 - 简介
控制系统是一种通过控制输出来提供所需响应的系统。下图显示了控制系统的简单框图。
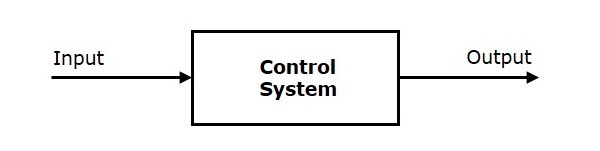
此处,控制系统由单个块表示。由于输出由变化的输入控制,因此控制系统得名。我们将使用某种机制来改变此输入。在下一节关于开环和闭环控制系统中,我们将详细研究控制系统内部的块以及如何改变此输入以获得所需的响应。
示例 − 交通灯控制系统,洗衣机
交通灯控制系统是控制系统的一个示例。此处,将一系列输入信号应用于此控制系统,输出是三个灯中的一个,这些灯将在一段时间内亮起。在此期间,其他两个灯将关闭。根据特定路口的交通研究,可以确定灯的开启和关闭时间。因此,输入信号控制输出。因此,交通信号灯控制系统按时间运行。
控制系统的分类
根据一些参数,我们可以将控制系统分为以下几种方式。
连续时间和离散时间控制系统
根据使用的信号类型,控制系统可分为连续时间控制系统和离散时间控制系统。
在连续时间控制系统中,所有信号在时间上都是连续的。但是,在离散时间控制系统中,存在一个或多个离散时间信号。
SISO 和 MIMO 控制系统
根据存在的输入和输出数量,控制系统可分为 SISO 控制系统和 MIMO 控制系统。
SISO(单输入单输出)控制系统有一个输入和一个输出。而MIMO(多输入多输出)控制系统有多个输入和多个输出。
开环和闭环控制系统
根据反馈路径,控制系统可分为开环控制系统和闭环控制系统。
在开环控制系统中,输出不会反馈到输入。因此,控制动作与期望输出无关。
下图显示了开环控制系统的框图。
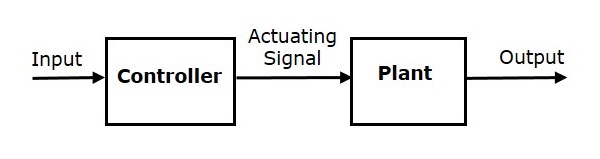
在这里,输入应用于控制器,它产生驱动信号或控制信号。该信号作为输入提供给要控制的工厂或过程。因此,工厂产生受控的输出。我们之前讨论的交通灯控制系统就是开环控制系统的一个例子。
在闭环控制系统中,输出反馈到输入。因此,控制动作取决于所需的输出。
下图显示了负反馈闭环控制系统的框图。
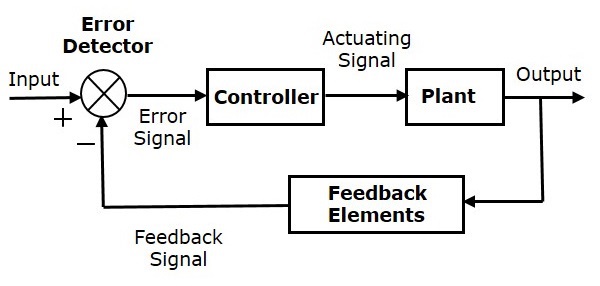
误差检测器产生误差信号,即输入和反馈信号之间的差值。通过将整个系统的输出视为该块的输入,可从块(反馈元件)获得该反馈信号。误差信号不是直接输入,而是作为控制器的输入。
因此,控制器产生控制设备的驱动信号。在这种组合中,控制系统的输出会自动调整,直到我们得到所需的响应。因此,闭环控制系统也称为自动控制系统。输入端带有传感器的交通灯控制系统就是闭环控制系统的一个例子。
下表列出了开环和闭环控制系统之间的差异。
| 开环控制系统 | 闭环控制系统 |
|---|---|
| 控制动作与期望输出无关。 | 控制动作取决于期望输出。 |
| 不存在反馈路径。 | 存在反馈路径。 |
| 这些也称为非反馈控制系统。 | 这些也称为反馈控制系统。 |
| 易于设计。 | 难以设计。 |
| 这些是经济的。 | 这些成本更高。 |
| 不准确。 | 准确。 |

