电子电路 - 整流器
每当需要将交流电转换为直流电时,整流电路就会派上用场。一个简单的 PN 结二极管充当整流器。二极管的正向偏置和反向偏置条件可实现整流。
整流
交流电具有连续改变状态的特性。通过观察交流电的正弦波可以理解这一点。它沿正方向上升,达到峰值正值,从那里降低到正常值,然后再次进入负部分并达到负峰值,然后再次恢复正常并继续。
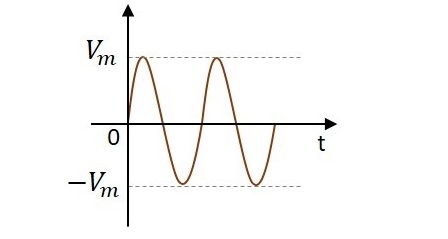
在波形成过程中,我们可以观察到波沿正方向和负方向传播。实际上,它完全改变了,因此得名交流电。
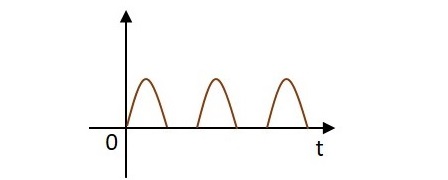
但在整流过程中,这种交流电会变成直流电。在此之前,以正向和负向流动的波,在转换为直流电时,其方向将仅限于正向。因此,电流只能在正方向上流动,而在负方向上受到阻碍,如下图所示。
进行整流的电路称为整流电路。二极管用作整流器,以构成整流电路。
整流电路的类型
根据输出,整流电路主要有两种类型。它们是
- 半波整流器
- 全波整流器
半波整流器电路仅整流输入电源的正半周,而全波整流器电路则整流输入电源的正半周和负半周。
半波整流器
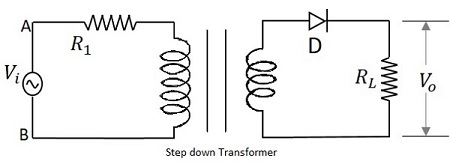
半波整流器的名称本身表明整流仅针对周期的一半进行。交流信号通过输入变压器提供,该变压器根据用途升压或降压。降压变压器主要用于整流电路,以降低输入电压。
提供给变压器的输入信号通过用作整流器的 PN 结二极管。该二极管仅在输入的正半周将交流电压转换为脉动直流电。负载电阻连接在电路末端。下图显示了半波整流器的电路。
HWR 的工作原理
输入信号提供给变压器,从而降低电压水平。变压器的输出提供给用作整流器的二极管。此二极管在输入信号的正半周期内导通(导通)。因此,电流在电路中流动,负载电阻两端的电压将下降。二极管在负半周期内关闭(不导通),因此负半周期的输出为 $i_{D} = 0$ 和 $V_{o}=0$。
因此,输出仅在输入电压的正半周期存在(忽略反向漏电流)。此输出将是脉动的,跨越负载电阻。
HWR 的波形
输入和输出波形如下图所示。
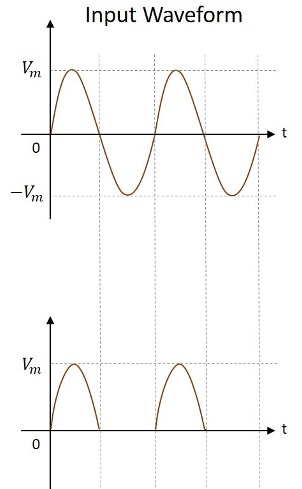
因此,半波整流器的输出是脉动直流电。让我们尝试通过理解从半波整流器输出获得的几个值来分析上述电路。
半波整流器分析
要分析半波整流器电路,让我们考虑输入电压方程。
$$v_{i}=V_{m} \sin \omega t$$
$V_{m}$ 是电源电压的最大值。
让我们假设二极管是理想的。
- 正向电阻,即导通状态下的电阻为 $R_f$。
- 反向电阻,即关断状态下的电阻为 $R_r$。
二极管或负载电阻 $R_L$ 中的电流 i 为通过
$i=I_m \sin \omega t \quad for\quad 0\leq \omega t\leq 2 \pi$
$ i=0 \quad\quad\quad\quad for \quad \pi\leq \omega t\leq 2 \pi$
其中
$$I_m= \frac{V_m}{R_f+R_L}$$
直流输出电流
平均电流 $I_{dc}$ 由下式给出
$$I_{dc}=\frac{1}{2 \pi}\int_{0}^{2 \pi} i \:d\left ( \omega t ight )$$
$$=\frac{1}{2 \pi}\left [ \int_{0}^{\pi}I_m \sin \omega t \:d\left ( \omega t ight )+\int_{0}^{2 \pi}0\: d\left ( \omega t ight ) ight ]$$
$$=\frac{1}{2 \pi}\left [ I_m\left \{-\cos \omega t ight \}_{0}^{\pi} ight ]$$
$$=\frac{1}{2 \pi}\left [ I_m\left \{ +1-\left ( -1 ight ) ight \} ight ]=\frac{I_m}{\pi}=0.318 I_m$$
代入 $I_m$ 的值,我们得到
$$I_{dc}=\frac{V_m}{\pi\left ( R_f+R_L ight )}$$
如果 $R_L >> R_f$,然后
$$I_{dc}=\frac{V_m}{\pi R_L}=0.318 \frac{V_m}{R_L}$$
直流输出电压
直流输出电压由以下公式给出
$$ V_{dc}=I_{dc} imes R_L=\frac{I_m}{\pi} imes R_L$$
$$=\frac{V_m imes R_L}{\pi\left (R_f+R_L ight )}=\frac{V_m}{\pi\left \{ 1+\left ( R_f/R_L ight ) ight \}}$$
如果 $R_L>>R_f$,然后
$$V_{dc}=\frac{V_m}{\pi}=0.318 V_m$$
RMS 电流和电压
RMS 电流的值由以下公式给出
$$I_{rms}=\left [ \frac{1}{2 \pi}\int_{0}^{2\pi} i^{2} d\left ( \omega t ight ) ight ]^{\frac{1}{2}}$$
$$I_{rms}=\left [ \frac{1}{2 \pi}\int_{0}^{2\pi}I_{m}^{2} \sin^{2}\omega t \:d\left (\omega t ight ) +\frac{1}{2\pi}\int_{\pi}^{2\pi} 0 \:d\left ( \omega t ight ) ight ]^{\frac{1}{2}}$$
$$=\left [ \frac{I_{m}^{2}}{2 \pi}\int_{0}^{\pi}\left ( \frac{1-\cos 2 \omega t}{2} ight )d\left ( \omega t ight ) ight ]^{\frac{1}{2}}$$
$$=\left [ \frac{I_{m}^{2}}{4 \pi}\left \{ \left ( \omega t ight )-\frac{\sin 2 \omega t}{2} ight \}_{0}^{\pi} ight ]^{\frac{1}{2}}$$
$$=\left [ \frac{I_{m}^{2}}{4 \pi}\left \{ \pi - 0 - \frac{\sin 2 \pi}{2}+ \sin 0 ight \} ight ]^{\frac{1}{2}}$$
$$=\left [ \frac{I_{m}^{2}}{4 \pi} ight ]^{\frac{1}{2}}=\frac{I_m}{2}$$
$$=\frac{V_m}{2\left ( R_f+R_L ight )}$$
负载两端的 RMS 电压为
$$V_{rms}=I_{rms} imes R_L= \frac{V_m imes R_L}{2\left ( R_f+R_L ight )}$$
$$=\frac{V_m}{2\left \{ 1+\left ( R_f/R_L ight ) ight \}}$$
如果 $R_L>>R_f$,然后
$$V_{rms}=\frac{V_m}{2}$$
整流器效率
任何电路都需要高效工作才能获得更好的输出。要计算半波整流器的效率,必须考虑输出功率与输入功率之比。
整流器效率定义为
$$\eta =\frac{d.c.power\:\: deliver \:\: to \:\: the \:\: load}{a.c.input \:\: power\:\:from\:\:transformer\:\:secondary}=\frac{P_{ac}}{P_{dc}}$$
现在
$$P_{dc}=\left ( {I_{dc}} ight )^2 imes R_L=\frac{I_m R_L}{\pi^2}$$
进一步
$$P_{ac}=P_a+P_r$$
其中
$P_a = 二极管结点处耗散的功率$
$$=I_{rms}^{2} imes R_f=\frac{I_{m}^{2}}{4} imes R_f$$
并且
$$P_r = 负载电阻中耗散的功率$$
$$=I_{rms}^{2} imes R_L=\frac{I_{m}^{2}}{4} imes R_L$$
$$P_{ac}=\frac{I_{m}^{2}}{4} imes R_f+\frac{I_{m}^{2}}{4} imes R_L =\frac{I_{m}^{2}}{4}\left ( R_f+R_L ight )$$
从 $P_{ac}$ 和 $P_{dc}$ 的表达式,我们可以写出
$$\eta =\frac{I_{m}^{2}R_L/\pi^2}{I_{m}^{2}\left ( R_f+R_L ight )/4}=\frac{4}{\pi^2}\frac{R_L}{\left ( R_f+R_L ight )}$$
$$=\frac{4}{\pi^2}\frac{1}{\left \{ 1+\left ( R_f/R_L ight ) ight \}}=\frac{0.406}{\left \{ 1+\left ( R_f/R_L ight ) ight \}}$$
整流器效率百分比
$$\eta =\frac{40.6}{\lbrace1+\lgroup\: R_{f}/R_{L} group brace}$$
理论上,半波整流器的整流器效率最大值在 $R_{f}/R_{L} = 0$ 时为 40.6%
此外,效率可以按以下方式计算
$$\eta =\frac{P_{dc}}{P_{ac}}=\frac{\left (I_{dc} ight )^2R_L}{\left ( I_{rms} ight )^2R_L}=\frac{\left ( V_{dc}/R_L ight )^2R_L}{\left (V_{rms}/R_L ight )^2R_L} =\frac{\left ( V_{dc} ight )^2}{\left ( V_{rms} ight )^2}$$
$$=\frac{\left ( V_m/ \pi ight )^2}{\left ( V_m/2 ight )^2}=\frac{4}{\pi^2}=0.406$$
$$=40.6\%$$
纹波系数
整流输出包含一定量的交流分量,以纹波的形式存在。通过观察半波整流器的输出波形可以理解这一点。要获得纯直流电,我们需要了解这个分量。
纹波系数给出整流输出的波动性。它用y表示。这可以定义为电压或电流交流分量的有效值与直流值或平均值之比。
$$\gamma =\frac{ripple \: voltage}{d.c \:voltage} =\frac{rms\:value\:of\: a.c.component}{d.c.value\:of\:wave}=\frac{\left ( V_r ight )_{rms}}{v_{dc}}$$
这里,
$$\left ( V_r ight )_{rms}=\sqrt{V_{rms}^{2}-V_{dc}^{2}}$$
因此,
$$\gamma =\frac{\sqrt{V_{rms}^{2}-V_{dc}^{2}}}{V_{dc}}=\sqrt{\left (\frac{V_{rms}}{V_{dc}} ight )^2-1}$$
现在,
$$V_{rms}=\left [ \frac{1}{2\pi}\int_{0}^{2\pi} V_{m}^{2} \sin^2\omega t\:d\left ( \omega t ight ) ight ]^{\frac{1}{2}}$$
$$=V_m\left [ \frac{1}{4\pi} \int_{0}^{\pi}\left ( 1- \cos2 \:\omega t ight )d\left ( \omega t ight ) ight ]^{\frac{1}{2}}=\frac{V_m}{2}$$
$$V_{dc}=V_{av}=\frac{1}{2\pi}\left [ \int_{0}^{\pi}V_m \sin \omega t \:d\left ( \omega t ight )+\int_{0}^{2\pi} 0.d\left ( \omega t ight ) ight ]$$
$$=\frac{V_m}{2 \pi}\left [ -\cos \omega t ight ]_{0}^{\pi}=\frac{V_m}{\pi}$$
$$\gamma =\sqrt{\left [ \left \{ \frac{\left ( V_m/2 ight )}{\left ( V_m/\pi ight )} ight \}^2-1 ight ]}=\sqrt{\left \{ \left ( \frac{\pi}{2} ight )^2-1 ight \}}=1.21$$
纹波系数也定义为
$$\gamma =\frac{\left ( I_r ight )_{rms}}{I_{dc}}$$
由于半波整流器中存在的纹波系数值为 1.21,这意味着输出中存在的交流量为直流电压的 $121\%$
调节
通过负载的电流可能因负载电阻而异。但即使在这种情况下,我们也希望负载电阻两端的输出电压保持恒定。因此,即使在不同的负载条件下,我们的电压也需要调节。
直流输出电压随直流负载电流变化的变化定义为调节率。百分比调节率计算如下。
$$百分比调节率=\frac{V_{no \:load}-V_{full\:load}}{V_{full\:load}} imes 100\%$$
百分比调节率越低,电源越好。理想电源的调节百分比为零。
变压器利用率
整流电路中,要输送到负载的直流功率决定了电路中使用的变压器的额定值。
因此,变压器利用率定义为
$$TUF=\frac{输送到负载的直流功率}{变压器次级交流额定值}$$
$$=\frac{P_{d.c}}{P_{a.c\left ( rated ight )}}$$
根据变压器理论,次级的额定电压为
$$V_m/\sqrt{2}$$
实际有效值流过它的电压将是
$$I_m/2$$
因此
$$TUF=\frac{\left ( I_m/\pi ight )^2 imes R_L}{\left ( V_m/\sqrt{2} ight ) imes\left ( I_m/2 ight )}$$
但是
$$V_m=I_m\left ( R_f+R_L ight )$$
因此
$$TUF=\frac{\left ( I_m/\pi ight )^2 imes R_L}{\left \{ I_m\left ( R_f+R_L ight )/\sqrt{2} ight \} imes \left ( I_m/2 ight )}$$
$$=\frac{2\sqrt{2}}{\pi^2} imes \frac{R_L}{\left ( R_f+R_L ight )}$$
$$=\frac{2\sqrt{2}}{\pi^2} = 0.287$$
峰值反向电压
二极管反向偏置时,应在受控电压水平下工作。如果超过安全电压,二极管就会损坏。因此,了解最大电压非常重要。
二极管可以承受的最大反向电压(不会损坏)称为峰值反向电压。简而言之,PIV。
这里的 PIV 就是 Vm
形状因子
这可以理解为波形上所有点的绝对值的数学平均值。形状因子定义为 R.M.S. 值与平均值的比率。它用 F 表示。
$$F=\frac{rms\:value}{average\:value}=\frac{I_m/2}{I_m/\pi}=\frac{0.5I_m}{0.318I_m}=1.57$$
峰值因子
必须考虑纹波中的峰值才能知道整流的效果如何。峰值因子的值也是一个重要的考虑因素。 峰值因子定义为峰值与 R.M.S. 值的比率。
因此
$$峰值因子=\frac{Peak\:value}{r.m.s\:value}=\frac{V_m}{V_m/2}=2$$
这些都是研究整流器时需要考虑的重要参数。

